I. Systemoversigt
1. Projektbaggrund
I de senere år er ulovlig transport af godskøretøjer på motorveje blevet et alvorligt problem, der bringer den nationale trafiksikkerhed i fare. Det overbelaster motorveje og broer, hvilket reducerer vejenes og broernes levetid betydeligt. Samtidig reduceres køretøjernes sikkerhedsfaktor betydeligt, hvilket konstant forårsager trafikulykker, og det er også let at forårsage trafikpropper og miljøforurening.
Regeringer på alle niveauer over hele landet har løbende øget deres indsats for at kontrollere overbelastet transport af motorvejskøretøjer og har opnået vigtige fasede resultater. På grund af komplekse sociale og økonomiske faktorer er den nationale situation med overbelastningsdetektering dog stadig meget alvorlig, og de skjulte farer for rebound er ikke blevet elimineret. Konsolidering af resultaterne af forvaltningen og løbende fremme af overbelastningsdetekteringsarbejdet er stadig under stort pres. Derfor er forvaltningen af overbelastet transport af køretøjer et langsigtet og dagligt arbejde, som skal fortsættes. Det er afgørende at indarbejde forvaltningen af overbelastet arbejde i en langsigtet mekanisme. Den spiller også en juridisk afskrækkende rolle i forhold til overbelastede køretøjer og kan også udvide sine funktioner til at omfatte vejinspektion, slå ned på den tilfældige mentalitet i forbindelse med ulovlig transport og rettidig kontrol og eliminering af forskellige ulovlige transportoperationer, herunder overbelastet transport.
2. Introduktion til vejesystemet
Vejeprincippet for statiske lastbilvægte er at parkere alle køretøjer på vejeplatformen for at veje hele køretøjet. Den har høj vejenøjagtighed og klare nationale standarder. Imidlertid kan en konventionel lastbilvægt kun måle hele køretøjets vægt, ikke akselvægten. Den kan bedømme, om hele køretøjet er overbelastet, men ikke om akselvægten er overbelastet. Den kan ikke opfylde vejforvaltningens krav til håndtering af overbelastet transport.
Denne plan kombinerer vores virksomheds mange års erfaring med design og fremstilling af overbelastningsdetekteringsudstyr og dets faktiske anvendelse i forskellige regioner af landet, undersøger omhyggeligt brugen af forskellige overbelastningsdetekteringsudstyr på markedet og tager omfattende hensyn til de specifikke behov hos vejforvaltningsafdelinger inden for styring af overbelastet transport. Den anvender avanceret teknologi og unikke designideer til at udvikle et dynamisk højpræcisions system til registrering af køretøjsvægt og akseltype. Det kan veje både akselvægt og totalvægt og kan skelne mellem akseltyper. Akselvægtens nøjagtighed kan også forbedres betydeligt.
2. Sammensætning af overbelastnings- og overgrænsesystem
1. Systemfunktioner
Den kan veje køretøjer, der passerer ved lav hastighed, og automatisk afgøre, om køretøjets vægt eller akselvægten er overbelastet;
Den kan registrere antallet af aksler, akselgruppe, akselvægt og køretøjets køretøjsvægt;
Den kan danne komplette oplysninger om køretøjsvejning, herunder akseltype, akselvægt, akselgruppe og totalvægt;
Den kan overføre vejeoplysninger til computeren via datagrænsefladen;
Kernen i systemet anvender modent og pålideligt udstyr, som alle har et modulært design, er let at vedligeholde og udvide, hvilket sikrer systemets høje pålidelighed.
Systemsoftwaren er moden, yderst pålidelig, dataene er komplette og effektive, og de kan deles fuldt ud, hvilket effektivt forbedrer arbejdseffektiviteten og eliminerer forskellige smuthuller i administrationen i videst muligt omfang.
2. Systemproces
Lastbilen føres ind i vejebanen på overlæsningsstationen, og nummerpladegenkendelsessystemet identificerer nummerpladen;
Dæk- (aksel-) identifikatoren identificerer antallet af aksler, og køretøjets vejesystem begynder at veje, bestemme akselgruppen og beregne akselvægten.
Når alle køretøjer passerer gennem køretøjsseparatoren og kommer ind på vejeplatformen, og vægten er i en relativt afbalanceret tilstand, registreres køretøjets samlede vægt, og akselvægten beregnes.
Vejesystemet sender vejeoplysninger (nummerplade, antal aksler, akselvægt, køretøjets samlede vægt osv.) til detektionscomputeren. Computeren afgør, om den er overbegrænset, og viser detektionsoplysningerne, såsom køretøjets vægt, overgrænse og overgrænsemængde, på skærmen.
Når køretøjet har gennemført de relevante operationer, frigiver køretøjsguidepersonalet de ikke-overbegrænsede køretøjer til at forlade detektionsområdet i henhold til oplysningerne på skærmen, guider de overbegrænsede køretøjer ind i stationsområdet til behandling, udskriver inspektionsformularen for overbegrænsede køretøjer og udfører relevante opladningsoperationer;
3. Systemopbygning og layoutplan
3.1 Systemets sammensætning
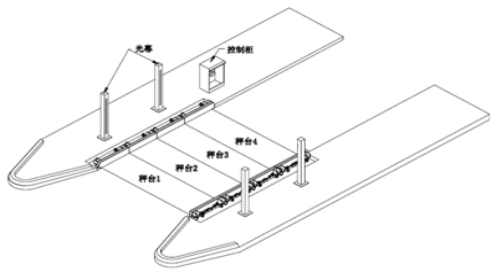
Overgrænse- og overbelastningssystemet består af en ZDG dynamisk akselvægt med fire borde, kontrolinstrument, infrarød køretøjsseparator, vejeplatform, hjulakselidentifikator, styreskab (valgfrit udstyr: nummerpladegenkendelsessystem, LED-storskærmssystem, stemmemeddelelsessystem, køretøjsstyringssystem, industricomputer, billetprinter, UPS-strømforsyning til nødstrøm, software til overgrænse- og overbelastningsdetektering, overvågningssystem) og andet tilbehør og kabler.
3.2 Systemlayoutdiagram som vist:
Arbejdsgang:
1) Køretøjer kører ind i vognbanen i rækkefølge, mens de holder en sikker afstand, hvilket udløser den infrarøde køretøjsseparator;
2) Hver aksel på køretøjet passerer gennem den multioverfladede vejeplatform;
3) Displaycontrolleren behandler vejesignalet fra vejeplatformens sensor og hjulsensorsignalet, adskiller akslen i henhold til de logiske betingelser og håndterer effektivt særlige situationer;
4) Bagenden af køretøjet forlader multifladevejeplatformen og den infrarøde køretøjsseparator;
5) Displaycontrolleren vurderer omfattende køretøjets slutsignal baseret på okklusionssignalet, der detekteres af den infrarøde køretøjsseparator, og vejesignalet, der opnås af vejesensoren;
6) Displaycontrolleren behandler det vejesignal, der opnås, når ovennævnte køretøj passerer vejeplatformen;
7) Displaycontrolleren viser komplette vejeoplysninger for hele køretøjet, og de komplette vejeoplysninger inkluderer køretøjets hastighed, akseltype, akselvægt, akselgruppevægt, totalvægt osv.;
8) Færdiggør vejningen af ét køretøj og vent på vejningen af det næste køretøj
9) Under hele arbejdsprocessen håndterer systemet automatisk forskellige særlige situationer, såsom fuld ind- og udstigning, gentagen ind- og udstigning samt længerevarende ophold på vejeplatformen;
Systemet kan automatisk og effektivt håndtere den følgende køretøjssituation, og den efterfølgende køretøjsvejning har ingen indflydelse på dataenes nøjagtighed.

Udsendelsestidspunkt: 20. feb. 2025